In the field of flexible electronic technology, a research team led by Professor Guo Xiaogang from Beijing Institute of Technology, drawing inspiration from muscle tissue and nervous system, has developed an electrothermal actuator that possesses somatosensory capabilities.
The biological system realizes the unity of action and perception through the muscle tissue and nervous system. Correspondingly, artificial soft actuators realize the unity of sensing and actuating functions in a single functional material, which will have tremendous potential for developing intelligent and bionic soft robotics. The research findings were published in the internationally renowned journal Small on the title of Somatosensory Electro-Thermal Actuator through the Laser-Induced Graphene Technology.
The resistance variations in the laser-induced graphene (LIG) layer were continuously acquired during the electrothermal actuation process, and the achieved dynamic structural deformations were monitored through reconstruction method. This design strategy realizes the seamless integration of actuating and sensing functionalities within a same actuator.
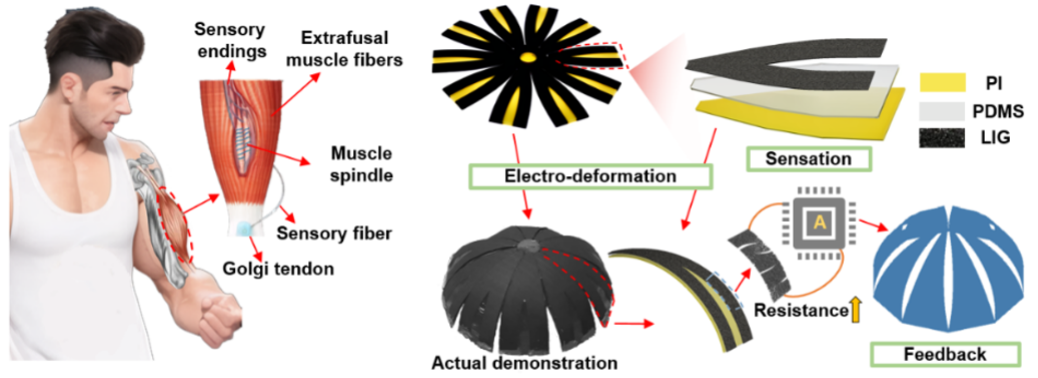
Fig.1 Schematic of the bioinspired self-sensing LIG-based actuators
Based on their prior research on flexible sensors and actuators, the research team successfully developed the actuators with intrinsic sensing capabilities by transferring LIG to a flexible PDMS substrate. The design ability of the LIG-based actuator unit is enriched, along with an effectively improved sensing sensitivity. Through the integration of different types of well-designed LIG-based actuator units, the transformations from multidimensional precursors to 2D and 3D structures are realized. According to the piezoresistive effect of the LIG units during the deformation process, the visual synchronous deformation state feedback method was proposed.
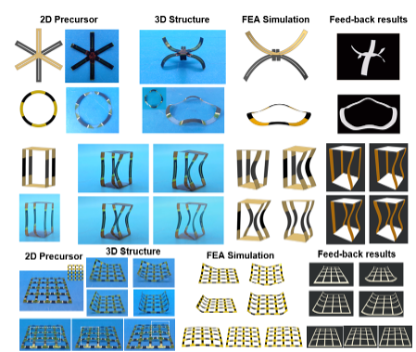
Fig.2 The demonstration of self-sensing LIG-based actuator units combined into different dimensional structures
Through the application of bionic structure design, the research team successfully developed bionic LIG-based actuators inspired by the lily, dionaea muscipula, hypericum ascyron and vine. This development enabled the imitation and reconstruction of various configurations, thereby validating the effectiveness of the proposed method.
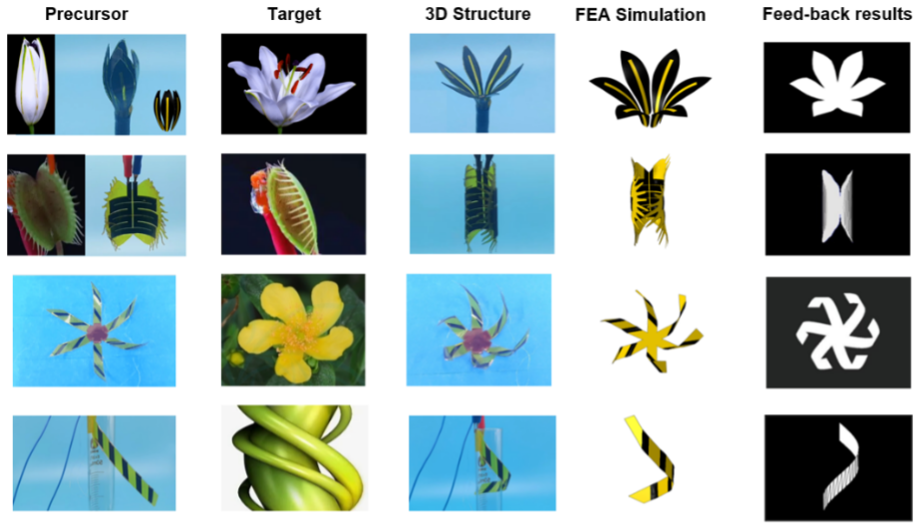
Fig.3 The demonstration of bionic self-sensing actuators
The switchable electromagnetic shielding cloak and size perceptible soft gripper serve as the demonstrations of the self-sensing LIG-based actuators, showing the advantage of our design in remote control of the soft robot without relying on the assistance of visual devices.
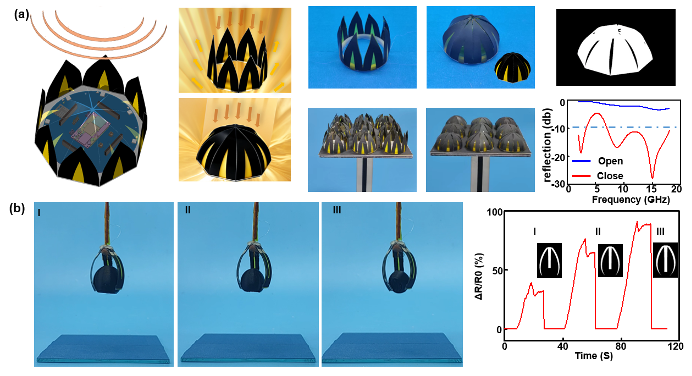
Fig.4 The application of self-sensing LIG-based actuators in soft robotics and electromagnetic shielding. (a) The demonstration of electromagnetic cloak composed by LIG-based actuators. (b) The demonstration of self-sensing LIG-based actuator gripper grasping different size objects.
Original Link:https://onlinelibrary.wiley.com/doi/abs/10.1002/smll.202310612
Somatosensory Electro-Thermal Actuator through the Laser-Induced Graphene Technology
Hao Wang, Xuyang Li, Xiaoyue Wang, Yong Qin, Yang Pan, Xiaogang Guo*
DOI: 10.1002/smll.202310612